FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes
1 Skeleton-based Space Decomposition
Skeleton Extraction
该方法参考自 Tagliasacchi et al. 2009
使用 ROSA( generalized rotational symmetry axis) Points 来表达点云骨架。
\[r_p = (\mathbf{x}_p, \mathbf{v}_p), p \in \mathcal{P}_D\]用于计算 ROSA 的点云 $\mathcal{P}_D$ 下采样自 输入点云 $\mathcal{P}_O$
求解方法:
- 确定锚点以及最佳切割平面
- 确定对应的邻域 $\mathcal{N}_p$,依赖于定义的距离,参考自 Lehtinen et al. 2008。
这个距离定义可以让 ${r_p}j$ 周围的等值面(iso-surface)是一个椭球,且该椭球跟 ${\mathbf{v}_p}_j$ 对齐的轴会比其他两个轴短 $1/(1 + F{squash})$。这意味着当 ${\mathbf{x}p}_i$ 偏离于和 ${\mathbf{x}_p}_j$ 相切的平面时,距离会增长得更快。我们使用 $F{squash} = 2$,这是一种马氏距离。
- 计算 $\mathbf{v}_p$,通过最小化该向量与邻域内的法向量角度方差
- 计算 $\mathbf{x}_p$,相当于最小化该点到邻域内点的沿着法向延长的直线的距离平方和
Skelekon Decomposition
度数大于 2 的节点称为 joint;度数等于 1 的节点称为 leaf。
branch 终止于 joint 或 leaf。
- DFS 深度优先从每个 joint 出发,得到一个个 branch
- 对第一步得到的 branch 作进一步的细分,为的是让单个 branch 的几何足够简单
Space Allocation
论文中的方式是根据计算出来的 ROSA points,或者按原文的描述是对边进行离散化,得到一堆有向点,确定出一个个平面,判断那些点云属于这个平面(根据点到平面的距离来衡量),然后点云就被归属到 ROSA points 对应的分支(branch)里,组成一个子空间(subspace)。
这是一个可以改进的点,该计算过程其实可以被省略,因为在计算 ROSA point 的时候,点云和 ROSA point 的对应关系就已产生了。
2 Skeleton-guided Viewpoint Generation
Internal Space and Viewpoint Sampling Ray
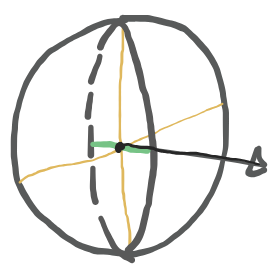
从骨架中的 ROSA 点 或 对边离散化得到的有向点 为起点,射向分配到该平面上的点,该方向作为 ray casting 的方向,对体素进行遍历。为了加速,也可以从边界另一端双向进行光线投射。该过程将栅格分成三类,靠近有向点的标记为内部,有点云的栅格标记为占据,继续向外的标记为空状态。
Iterative Updates of Viewpoint Pose
从占据栅格出发,射出的射线称为 视角采样射线(viewpoint sampling ray) $r_{vs}$,起点和方向定义为 \(\mathbf{sr} = [x_{sr}, y_{sr}, z_{sr}], \mathbf{dr} = [nx_{dr}, ny_{dr}, nz_{dr}]\)
定义视野为 5-DOF,表示为
\[\mathbf{vp} = [\mathbf{p}, \theta, \phi, id]\]$\mathbf{p}$ 是视野或相机等传感器的位置,$\theta,\phi$ 是 pitch 和 yaw 的角度。
\[\mathbf{p} = \mathbf{sr} + D \mathbf{dr}\] \[\theta = \arcsin (-nz_{dr}/\left\| \mathbf{dr} \right\|)\] \[\phi = \arctan (-ny_{dr}/-nx_{dr})\]简单来说,视角位于物体表面的 $D$ 距离处,朝向是射线的反向,也就是看向物体表面。
这些视角称作初始视角,其集合表示为 $\mathcal{VP}_{ini}$。
- 通过双向光线投射 BiRC 确定被视野 $\mathcal{VP}_{ini}$ 覆盖到的栅格,如果一个栅格被多个视角覆盖到,则被配对到保留覆盖数更多的视角。最后如果一个视角没有被分配给任何一个体素,从集合中移除其余视角
- 合并视角,文中称之为 gravitation-like model,会从 $\mathcal{VP}$ 中构建 kd 树 $T_{ini}$,从覆盖数最多的视角开始,直到覆盖数最小的视角,查找给定半径内的覆盖数小于当前视角的活跃视角,更新被查询视角位置后,将活跃视角休眠
- 重复步骤 1 BiRC 判断未被覆盖到的体素,并生成视角集合 $\mathcal{VP}_{unc}$ 以提高覆盖率
- 对 $\mathcal{VP}_{unc}$ 执行以上步骤,可多次迭代
最后活跃的视角的 id 会分配给对应的子空间,因此按子空间可以对最后活跃视角集合进行划分。
\[\mathcal{V} = \{ \mathcal{VP}_1,\cdots, \mathcal{VP}_N \}\]其中,步骤 2 中涉及到的查询半径定义为
\[r_q = d_v \tan(\min(f_h,f_w)/2)\]合并的公式如下,其含义为在给定的半径里,要把覆盖数低于当前查询视角的视角休眠,并且让当前视角尽量往覆盖数最多的要被休眠的视角位置移动,用以尽可能地补偿视角休眠带来的覆盖丢失。
\[\bar{\mathbf{p}}_q = \mathbf{p}_q + \sum_{\mathbf{vp}_a \in \mathcal{VP}_a} \frac{c_a}{c_q} (\mathbf{p_a} - \mathbf{p_q}),\ \mathrm{s.t.}\ c_a < c_q\]该小节的问题可以抽象为集合覆盖问题,可由此寻找更优的算法。
LKH 算法
ref: An Effective Implementation of the Lin-Kernighan Traveling Salesman Heuristic
旅行商问题(TSP,Traveling Salesman Problem)是一个著名的组合优化问题,易于描述但难以求解。
给定邻接矩阵(或代价矩阵)$\mathbf{C} = (c_{ij})$,其中 $c_{ij}$ 表示从点 $i$ 转移到点 $j$ 的代价,找到一个对正整数 $1$ 到 $N$ 的置换或排列方式(permutation)$(i_1,i_2,\cdots,i_N)$
\[\min (c_{i_1i_2} + c_{i_2i_3} + \cdots + c_{i_{N-1}i_{N}} + C_{i_{N}i_1})\]目前最好的求解算法为 LKH 算法,是一种启发式算法。
$i$ 表示在算法的中间过程中的 i-opt (P12注释)
选择 $t_1$,如果 2-opt 可以找到更短的路径,则 $T = T’$,重新选择 $t_1$
对于第一和第二层,执行深度优先搜索并且会回溯。
本质是找 $X$ 和 $Y$ 这两个集合,然后通过一些规则进行限制搜索范围,以使复杂度可接受。最后将 $X$ 中的边删除,链接 $Y$ 中的边,形成一个更短的新途径。
规则:
- 对 $x_i$ 的不平凡约束有:跟 $t_1$ 链接后能闭合
- 对 $y_i$ 的不平凡约束有:增益前缀和 $G_i$ 大于 0、有下一个 $x_{i+1}$
- 相互约束:两个集合没有交集