AirSLAM Code Reading
代码实现
首先看一下 airslam 代码的整体思路。
对于视觉惯性里程计,其核心是三个并行的线程: ->(处理msg)->(前端)->(后端)->
使用 生产者-消费者 的框架实现数据的有向流动。例如 map_builder.AddInput(data) 往里加数据,然后另外开一个线程消耗数据,提取特征,最后再开一个线程进行特征追踪匹配和后端优化。
参数的初始化
对于参数的配置,airslam 在 read_config.h 内定义了许多结构体,其中有三个最顶层的结构体,对应 airslam 的三大模块的参数,分别是:
VisualOdometryConfigsMapRefinementConfigsRelocalizationConfigs
在这三大结构体内,还有许多子结构体,对应于一些子模块/子功能需要配置的参数。这些大结构体都有构造函数,在构造函数内:
- 读取总的 yaml 配置文件
- 之后将获取的配置信息分发给各个子config,也就是各个子config存储了相应配置
- 其他 非config 的模块初始化的时候会传入config结构体的实例,在其构造函数内将子 config 存储的参数赋值给成员变量,从而实现参数的传递。
以 VisualOdometryConfigs 为例,其内部声明了一系列子 config:
struct VisualOdometryConfigs{
...
PLNetConfig plnet_config;
SuperPointConfig superpoint_config;
PointMatcherConfig point_matcher_config;
LineDetectorConfig line_detector_config;
KeyframeConfig keyframe_config;
OptimizationConfig tracking_optimization_config;
OptimizationConfig backend_optimization_config;
RosPublisherConfig ros_publisher_config;
RosSubscriberConfig ros_subscriber_config;
...
在它的构造函数里 ` VisualOdometryConfigs(const std::string& config_file_, const std::string& model_dir_)`,会调用 yaml-cpp 的接口获取所有的键值对:
YAML::Node file_node = YAML::LoadFile(config_file_);
...
ros_publisher_config.Load(file_node["ros_publisher"]);
...
每个子 config 都有一个 Load 成员函数,在获取键值对后,每个子 config 成员均会调用各自的 Load 函数,传入上面声明的变量 file_node。每个 Load 函数本质上是对 yaml-cpp 接口的封装,以 plnet_config.Load() 为例:
void Load(const YAML::Node& plnet_node){
use_superpoint = plnet_node["use_superpoint"].as<int>();
max_keypoints = plnet_node["max_keypoints"].as<int>();
keypoint_threshold = plnet_node["keypoint_threshold"].as<float>();
remove_borders = plnet_node["remove_borders"].as<int>();
line_threshold = plnet_node["line_threshold"].as<float>();
line_length_threshold = plnet_node["line_length_threshold"].as<float>();
}
是否使用 imu,参数值在 camera 的配置文件里给出
特征检测器
主要文件:feature_detector.h 和 feature_detector.cc
类 FeatureDtector,有 6 个 Detector() 成员函数的重载,这 6 个重载可以由两类属性组合得到:
- 相机个数:2 种
- 单目
- 双目
- 特征类型:3 种
- 点特征
- 点特征、线特征
- 点特征、线特征、线端点
2 * 3 = 6 种
根据 Detector() 和 以下的类构造函数可以看到,其调用了更底层的模块 plnet,因此如果需要修改特征检测方法,可以从此处入手。
FeatureDetectorPtr feature_detector = std::shared_ptr<FeatureDetector>(new FeatureDetector(plnet_config));
增加 rosbag 支持
原始的 airslam 仅支持 ASL 格式的数据集,也就是图片文件形式的数据集,没有读取 rostopic 的接口,因此无法实时运行,也无法跑 rosbag 格式的数据集。
为了适配 rosbag 的功能,需要增加的代码包括:
- 某帧图像对应的 imu batch 合成代码
- 话题的订阅 read_configs.h
- 新线程用于读取 msg,处理后得到给特征提取的
- 新数据集的内外参配置
imu 数据 和 img 数据的频率有差异,imu 数据频率高,因此需要对两帧图像帧间的imu数据进行缓存打包,用于后续的预积分。差异如下:
img + + + +
imu ***************
airslam 的 imu 预积分用的数据与 vins 有所不同,相比 vins 多用了一个数据,每两个相邻的 imu batch 都有图像前后两个imu数据的重叠,如下图:
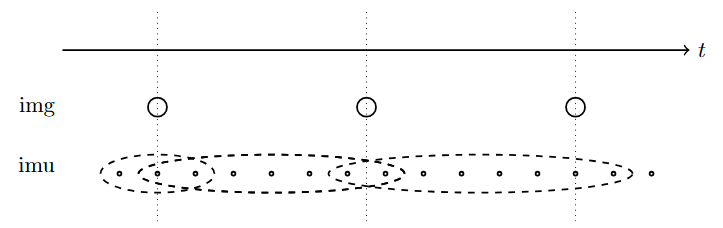
如果某个图像帧,在其之前无任何 imu 数据,则会丢弃该图像帧,因为无 imu 可以用于预积分。