四轴硬件组成与控制思路
介绍四轴硬件组成及控制思路。
整体结构与购买清单
整体组成可分为:
- 框架:机架、涵道圈、桨叶保护、碳纤维板、玻璃纤维板等等
- 动力:电机、电调、电池、5V稳压模块
- 感知:双目深度相机、激光雷达、工业单目相机
- 控制:飞控、机载电脑
- 通信:遥控器、RC接收机、数传、网卡、路由器
- 线材:DC供电线、飞控连接线、相机连接线、HDMI连接线、HDMI欺骗器
耗材与工具:
- 耗材:硅胶线、硅胶杜邦线、XT60公/母头、双通柱、螺丝、3M双面胶
- 工具:烙铁、烙铁头、海绵、焊锡、夹持架、扳手、螺丝刀、万用表、切割垫
具体型号见:自主无人机配件购买清单
无人机主要技术参数
以下是较为重要的参数:
- 重量:894g(不含电池),1008g(含电池)
- 对角线轴距:230mm
- 最大有效载荷:800g
- 桨叶:6寸3叶
- 电机:KV1750
- 电池
- 型号:格氏 GS-4000mAh-25C-3S1P
- 电池类型:LIPO锂电池
- 有效容量:4000mAh
- 使用电压:10.8~12.6V
- 存放电压:11.4V
更多参数详见:P230技术参数
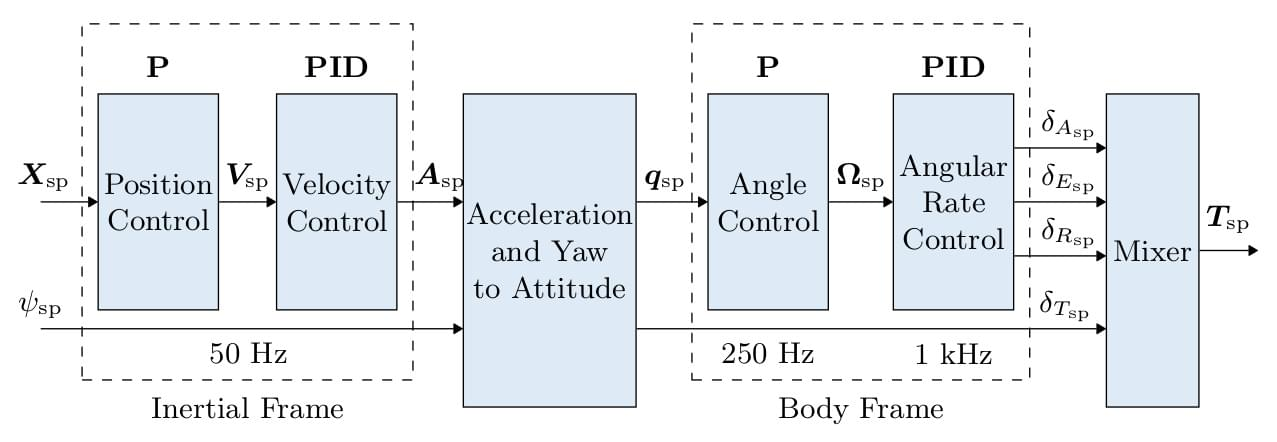
了解了PX4飞控的控制架构
了解控制器的控制架构,可以避免盲目调参。
多旋翼的控制架构:
- 级联控制结构,位置环为最外环,加速度和偏航角本质上是由四轴的姿态来控制的
- 控制器采用P和PID控制的组合方式
- 状态估计来自EKF2模块。
- 在某些模式下,外环(位置回路) 可能会被绕过 (在图中表示为外环之后增加一个多路开关)。 只有在位置保持模式或某轴无速度请求时,位置回路才会发挥作用。
 详见:PX4控制器图解
详见:PX4控制器图解
在自稳模式下进行了试飞
过程如下:
- 检查遥控器是否设置了紧急断电通道;
- 遥控器所有开关上拨,进入自稳遥控模式
- 将四轴放置在空旷处
- 电池电压检查,连接电池与飞控
- 左摇杆拨向右下角一段时间解锁飞控,解锁后,需要把左摇杆拉到最低,使无人机电机怠速运行(有的遥控器左摇杆自动回中,如果没有主动拉低左摇杆,无人机会不断向上加速,在室内容易撞到天花板)
- 手动稳定飞机的位置
- 降落时控制油门,避免无人机下降速度太快,导致“硬着陆”,降落后左摇杆摇向左下锁定无人机;
- 出现意外情况下拨七通道对应的开关,所有电机将立刻停转。
学习了卡尔曼滤波的推导
- 利用了链式法则,将联合概率表示成多个条件概率的乘积
- 利用马尔可夫链的假设,简化条件概率的表达形式
- 根据条件概率的定义,写出给定测量值时的本时刻状态后验概率,以及下一时刻的状态后验概率
- 对比相邻时刻状态后验概率表达式,得到时间更新和测量更新公式