Drone Vibration
四旋翼无人机的飞行控制的反馈主要来自于 IMU,也就是加速度计和角速度计,其中角速度测量值对震动不敏感,而加速度测量值对震动十分敏感,若减震不佳,如机架有其他部件未上紧,或是桨叶严重受损,都会对带来高频的振动噪声,对飞行控制还有里程计的估计有“毁灭性的污染”。此时使用数字滤波,只会带来很大的相位延迟,仍然会导致控制的不稳定。因此只有从源头上解决震动,辅以软件数字滤波,才能得到较好的控制效果。
引用自 px4 的教程: A few of simple steps that may reduce vibrations are:
- Make sure everything is firmly attached on the vehicle (landing gear, GPS mast, etc.).
- Use balanced propellers.
- Make sure to use high-quality components for the propellers, motors, ESC and airframe. Each of these components can make a big difference.
- Use a vibration-isolation method to mount the autopilot. Many flight controllers come with mounting foam that you can use for this purpose, while others have inbuilt vibration-isolation mechanisms.
- As a last measure, adjust the software filters. It is better to reduce the source of vibrations, rather than filtering them out in software.
振动影响因素实验
为了验证不同因素对加速度计测量值震动,进行了一下几个实验:
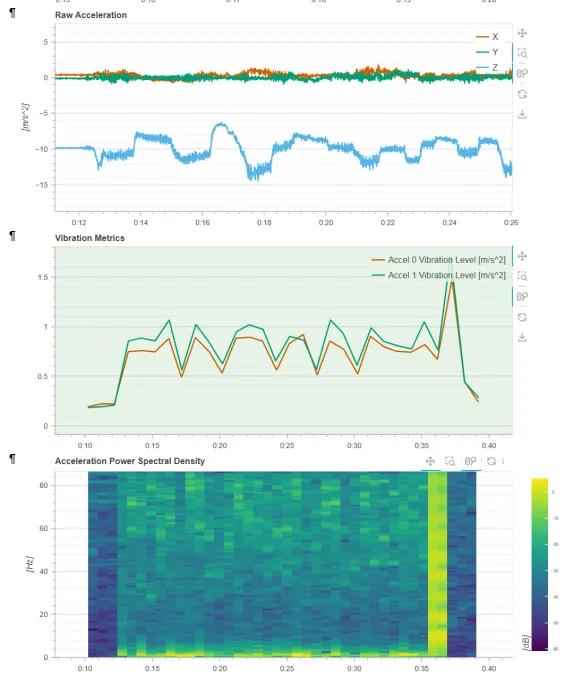
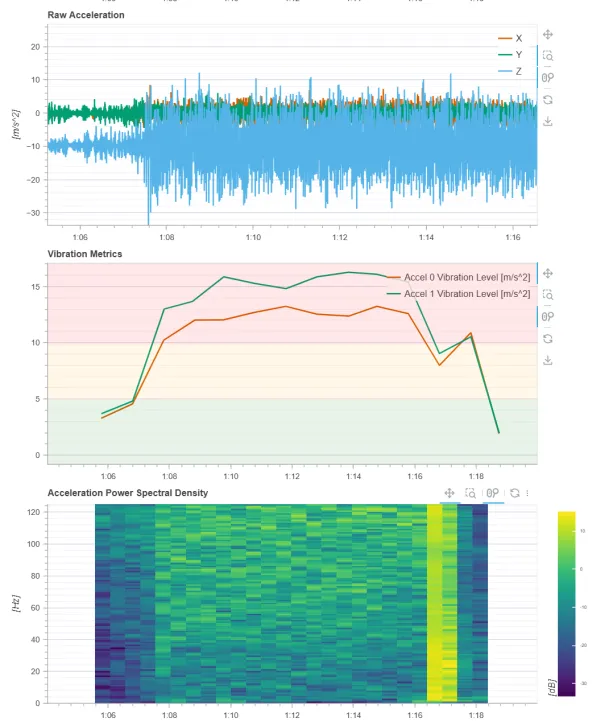
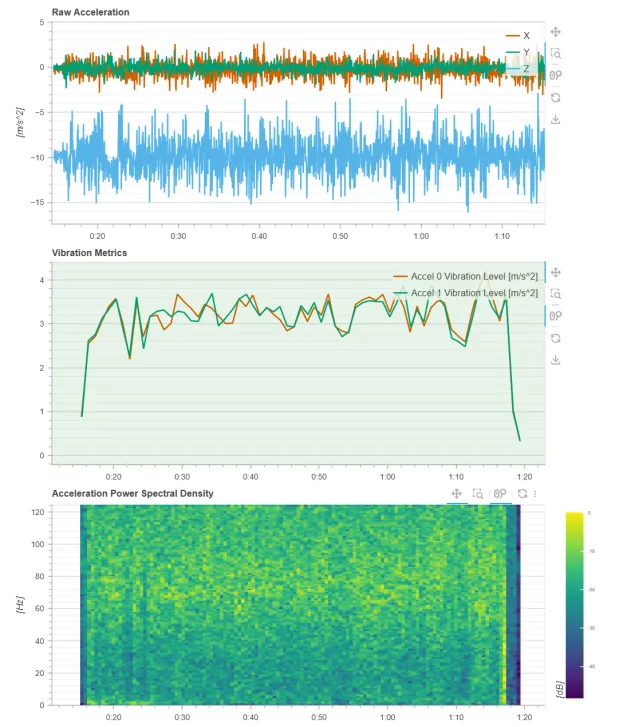
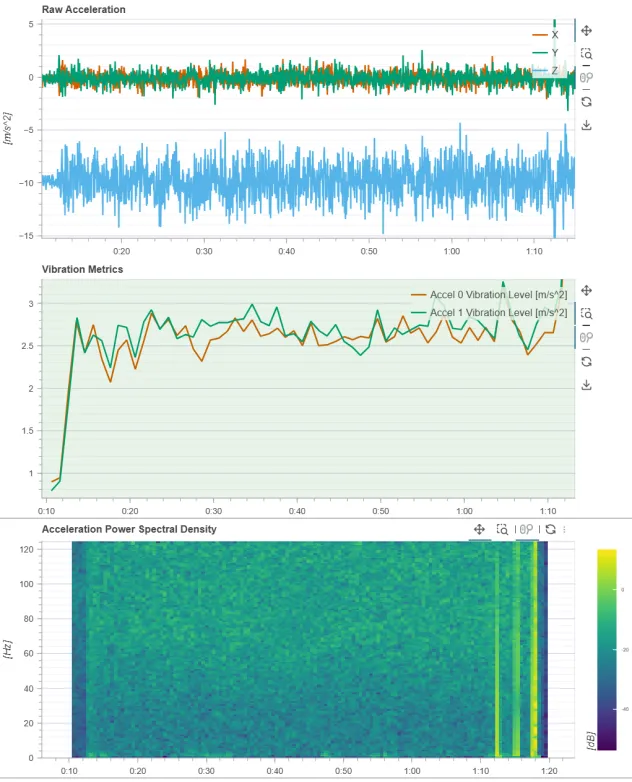
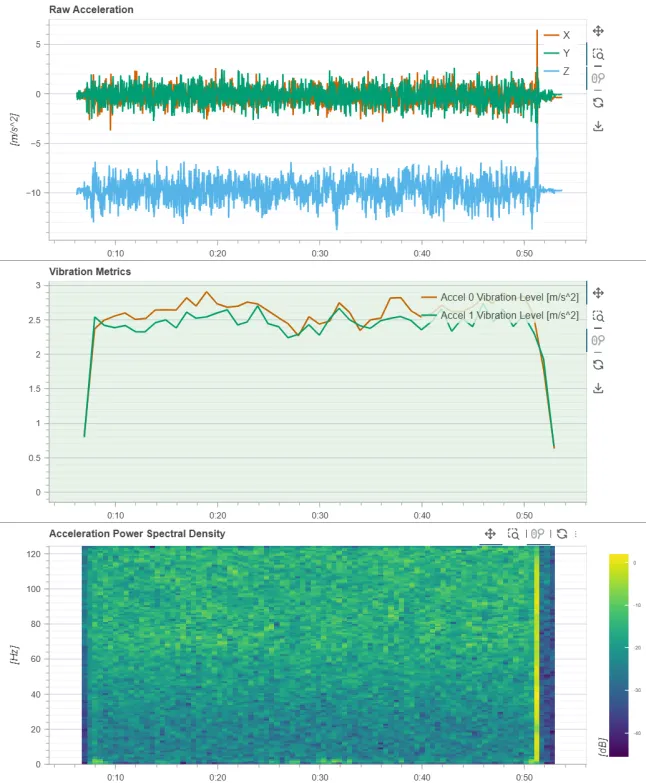
第一个实验为震动最小的配置,作为一个参考基准,震动最小的原因是其桨叶全新,同时上部未安装相机、NX机载电脑等额外的负载,因此振动的来源最少。第二至四个实验,随着改进措施的实施,震动逐渐减小,结果如下:
| 实验编号 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 振动幅值[m s^-2] | 0.75 | 15.0 | 3.0 | 2.75 | 2.5 |
结论为桨叶弯折会带来巨大的振动,负载晃动会带来一定的振动,桨叶轻微磨损则问题不大。
具体实验配置和测试结果如下:
-
08 号:桨叶全新 + 无任何额外负载
-
01 号:桨叶磨损弯折 + 负载松动
-
01 号:桨叶换新 + 负载松动
-
01 号:桨叶换新 + 上紧用于固定 RS 相机的 3D 打印件
-
01 号:桨叶换新 + 上紧rs相机打印件 + 垫nx板打印件中间
油门估计反馈量的选择
下图是滑窗100 + 延迟补偿,imu原始数据 和 imu_propagate 的速度微分后 都有相同的高频噪声,差了个9.8的直流分量,都不适合用于油门估计。
odom的速度微分后,得到加速度,频率较低,但没有高频噪声。
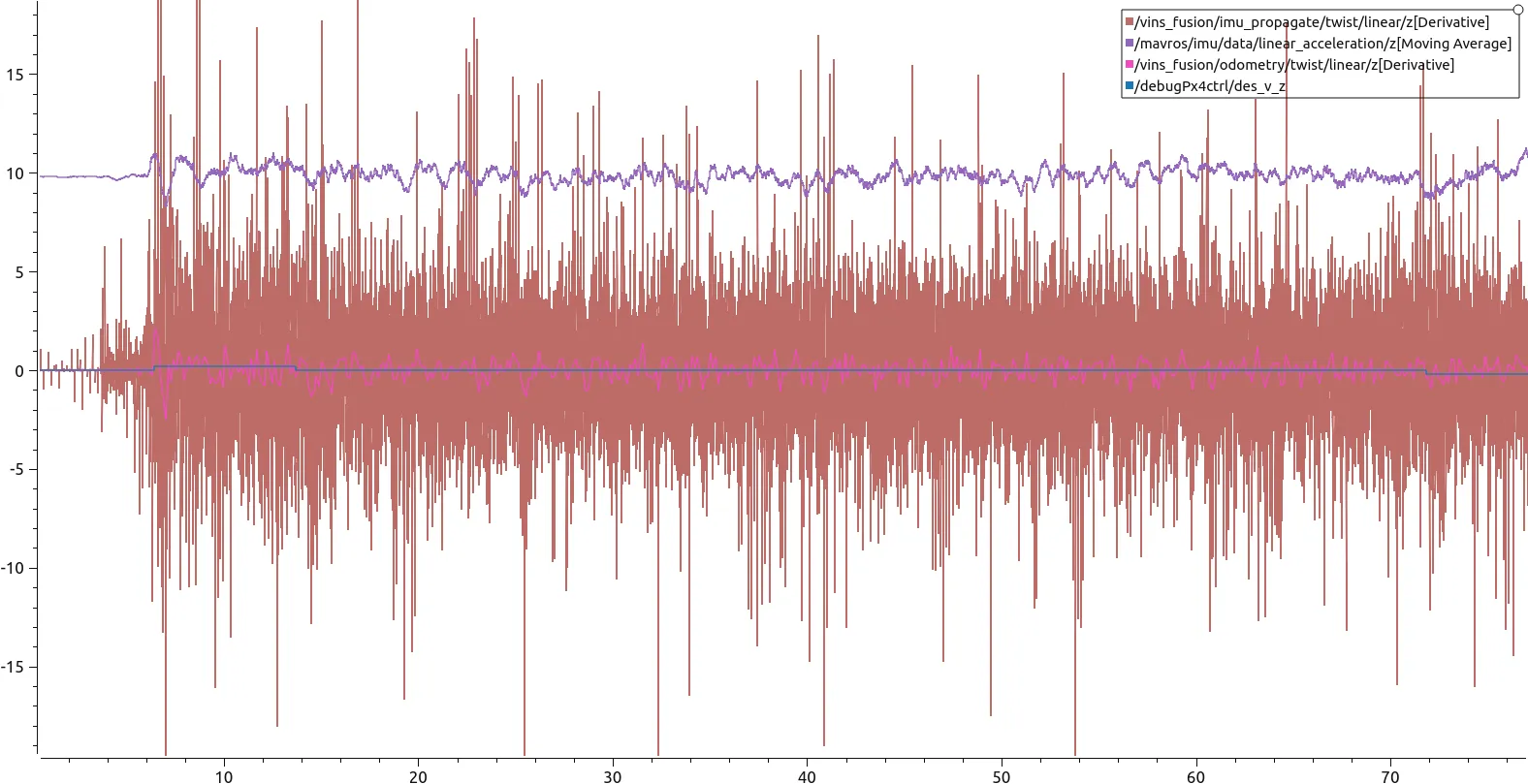
归根结底,如果没有解决振动问题,并没有合适的加速度反馈量来源,因此首要的目的还是利用上文的结论对 imu 进行减震。
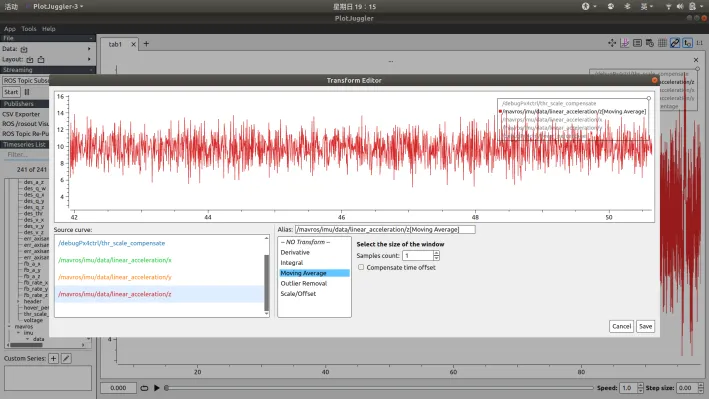
数字一阶低通滤波
在完成减震后,可进一步使用软件滤波,进一步提高加速度计测量值的质量,同时不带来太多的相位延迟。
一阶低通滤波,给定截止频率 $f_c$,采样频率 $f_s$,可计算权重: \(b = 2 \pi \frac{f_c}{f_s}\)
\[a = \frac{b}{1 + b}\] \[y[n] = a * x[n] + (1-a) * y[n-1]\]如果选择 a = 0.5 进行滤波,效果如下:
| 实验类型 | 无滤波 | 有滤波(a = 0.5) |
|---|---|---|
| 振动幅值 [m s^-2] | 2.5 | 2.0 |
无滤波:
有滤波: