Realization of Online Temporal Calibration on AirSLAM
AirSLAM 在公开数据集上的效果很不错,但在笔者自己录制的数据集上效果很差,具体如下:
- AirSLAM 使用 imu 和相机,定位漂移很大
- 而相同的外参在 vins-fusion 上的效果却还不错。
- AirSLAM 仅使用双目,漂移小,较为正常
根据第一条和第三条信息,可以推断出是 imu 和相机之间的协调出了问题,可能的原因是:
- 时间基准不同:公开数据集的 imu 与 图像帧有硬件同步且参考同一个时间基准,而自己录制的数据集未作同步且不是同一个时间基准,而 vins-fusion 在运行过程中在线校准 imu 和图像帧的时间偏移。这是二者存在的一个较为明显的区别,
- 相机与 imu 之间的外参不够准确:虽然 vins-fusion 和 AirSLAM 使用的外参一致,但 vins 有对外参做在线估计校准,而 AirSLAM 没有。
本篇主要验证是否是未进行时间偏移估计导致的 AirSLAM 效果较差。笔者在 airslam 上增加了时间偏移估计,思路参考 vins-fusion,github 上 fork 的仓库内对应的提交为 Commit b16d3ea: add time composition between camera and imu data.。
最终的实验结果证明,自己的数据集中,相机的时间基准比 imu 的时间基准快 1.6 ms,影响较小,即使不进行在线时间偏移估计,也不会导致轨迹的大幅度漂移,因此导致 AirSLAM 在自己录制的数据集上漂移较大的并不是时间基准偏移,而是另有其因(相机与 imu 之间的外参不够准确,且无在线校准)。
如何将时间偏移加入到优化框架中
对于多个传感器时间戳的质量,可以分成三类:
- 既同步,又有相同时间基准
- 不同步,但有相同时间基准
- 既不同步,又无相同时间基准
其中,无相同的时间基准对 VIO 或 SLAM 系统的影响最大
接下来我们需要搞清楚,是哪些数据组合喂给了前端:
- 接收到一帧新图像
- 根据这帧图像,以及上一帧图像的时间戳,收集在这段时间内的 imu 数据
如果存在时间基准的偏移,那么我们就会把图像相对于自身时间基准的时间戳,当成是相对于 imu 时间基准的时间戳,然后收集打包两个时间戳之间的 imu 数据
根据下图可以看到:
- (1) 应当对应的 imu 数据,时间区间为 $[t_2, t_4]$
- (2) 实际打包给前端的 imu 数据,时间区间未 $[t_1, t_3]$
二者不再是同一个区间。在统一的时间基准下(以 imu 的时间基准为参考),图像帧对应的时间区间是 $[t_2, t_4]$,而打包的 imu 却是在 $[t_1, t_3]$
td
|->|
|----x-----x----->
|<--->| (1)
|--ooooooooooooo->
|<--->| (2)
|----x-----x----->
|----t1-t2-t3-t4---->
解决思路的核心是用现有的信息预测其他时间的数据,类似插值,之后将修正后的数据带入原有的优化表达式,由于修正的数据的表达式中含有时间差,因此优化器会对 时间差 做优化,从而估计出时间差。
那什么是现有的数据呢?$t_2$、$t_4$ 两帧图像中的特征点位置,以及它们的速度就是现有的信息。需要预测的便是 $t_1$、$t_3$ 时刻的特征点位置。
某个投影约束的表达式为:
\[r_i(Z,X) = z_i - \pi(T_{cw}\ ^wp)\]其中,约束的 id 是 $i$,特征点位置为 $z_i$,$pi$ 把相机系下的 3D 点投影到像素或归一化平面上。
对特征点进行修正后,代入残差表达式:
\[r_i(Z,X) = (z_i - V_i t_d ) - \pi(T_{cw}\ ^wp)\]其中,特征点的运动速度为 $V_i$。在 $t_d$ 时间内特征点被假设为匀速运动。
这样我们便得到了最初版本的,包含时间偏移的残差表达式。但这还不是最终用在程序里的表达式。
最值得思索的是:
-
用已有的特征点去估计 imu batch 对应的起始或结束时刻的特征点位置
-
在应用的时候是以迭代的形式使用,使得算法能够处理较大时间偏移,因为匀速运动的假设会随着迭代的进行愈加正确。
实验
给同步的数据集人为增加时间偏移,作为真值。使用的数据集是 MH_05_difficult.bag。
对数据集中 imu 的时间戳偏移不同程度,并分别运行里程计。里程计漂移在本文定义为,里程计给出的终点位置与终点真值的距离。时间偏移估计值的初始值均设置为 0 ms。结果如下:
| 实际时间基准偏移 [s] | 偏移估计值 [s] | 里程计漂移(w) [m] | 里程计漂移(w/o) [m] |
|---|---|---|---|
| 0.030 | 0.035 | 0.095 | 0.382 |
| 0.060 | 0.068 | 0.363 | 1.523 |
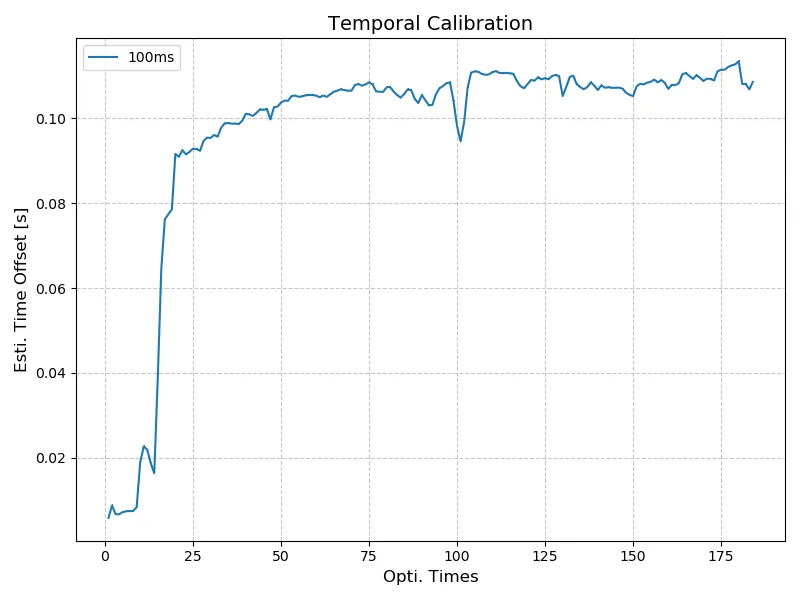
| 0.100 | 0.108 | 0.614 | 2.867 |
下图展示了 100 ms 偏移情况下,时间偏移估计值是如何收敛到真实偏移附近的:
需要注意的是,在 rosbag 中,有两个和时间相关的量,一个是和 topic、msg 同级的 t,另一个是在消息内部的 msg.header.stamp。二者是不同的,t 表示的是在 rosbag 中消息被记录或者被发布的时刻,而 msg.header.stamp 才是传感器数据的时间戳。
下面是将已作时间同步的数据集人为进行偏移一定时间的程序:
#!/usr/bin/env python
import rosbag
import rospy
from std_msgs.msg import Header
# Time offset (30ms)
time_offset = 0.10 # 30ms = 0.03s
def adjust_timestamp_in_rosbag(input_bag_file, output_bag_file, topic_name):
# Open the original bag file and the new bag file
with rosbag.Bag(input_bag_file, 'r') as in_bag, rosbag.Bag(output_bag_file, 'w') as out_bag:
for topic, msg, t in in_bag.read_messages():
# If it's the specified topic, modify the timestamp
if topic == topic_name:
new_time = msg.header.stamp + rospy.Duration(time_offset)
# Update the timestamp in the message (if the message contains a Header)
if hasattr(msg, 'header') and hasattr(msg, 'header'):
msg.header.stamp = new_time
else:
rospy.logwarn(f"Message {topic} does not have a Header, skipping timestamp adjustment")
# Write the modified message to the new bag file
out_bag.write(topic, msg, t)
rospy.loginfo(f"Timestamps have been offset by {time_offset} seconds. Output file: {output_bag_file}")
if __name__ == '__main__':
# Specify the input and output bag file paths, and the topic name to adjust
input_bag_file = '../rosbags/MH_05_difficult.bag' # Input ROS bag file
output_bag_file = '../rosbags/' + 'MH_05_difficult_offset' + str(int(time_offset*1000)) + "ms.bag" # Output ROS bag file
topic_name = '/imu0' # The topic name to adjust timestamps for
# Call the function to adjust the timestamps
adjust_timestamp_in_rosbag(input_bag_file, output_bag_file, topic_name)
其他测试
为了直观地观察 imu 和图像时间戳的分布情况,写了一个脚本将其绘制出来。
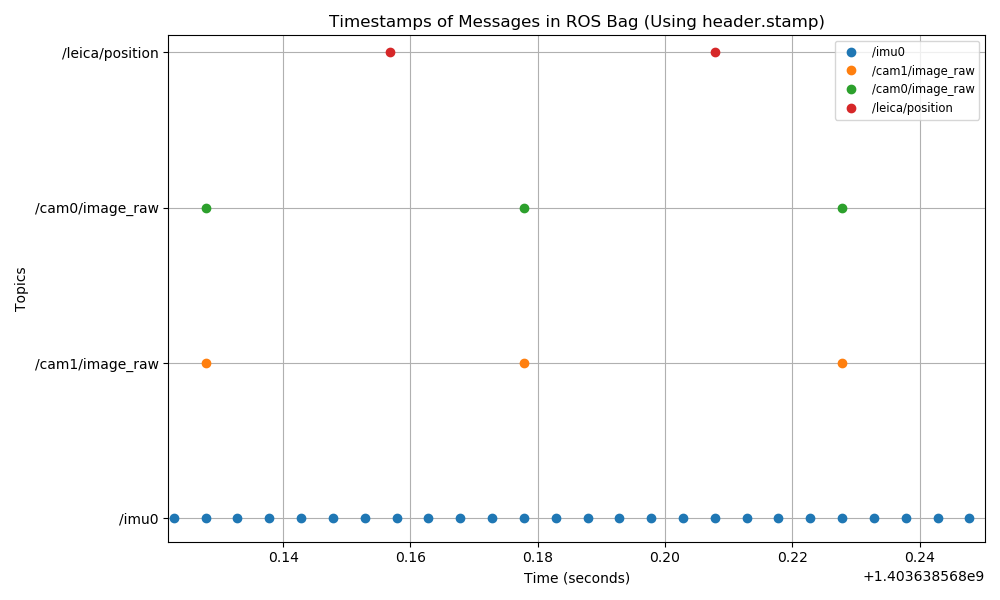
MH_05_difficult.bag 的相机和 imu 同步做的很好:
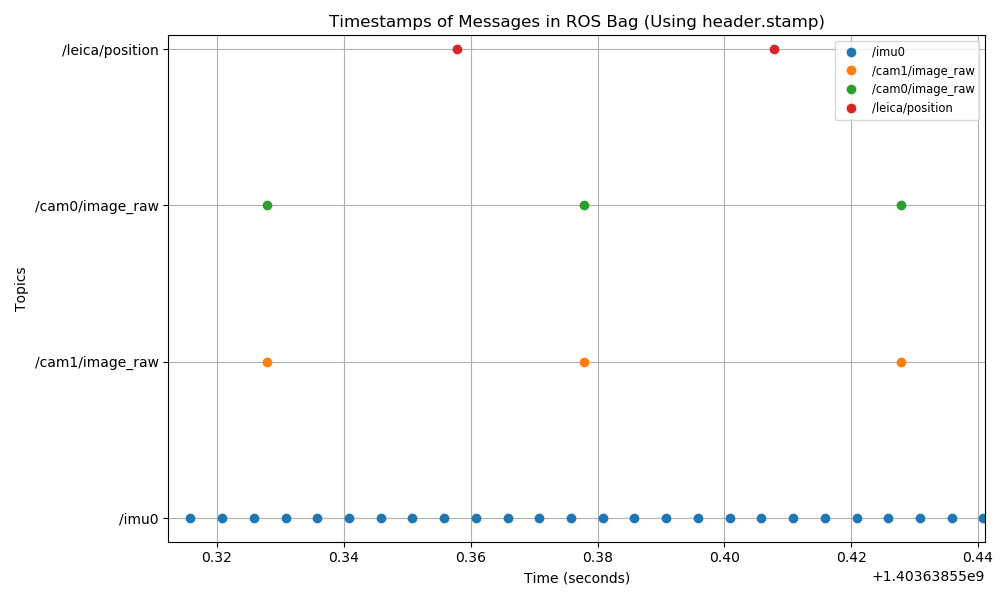
对 MH_05_difficult.bag 中的 imu 时间戳增加 3 ms:
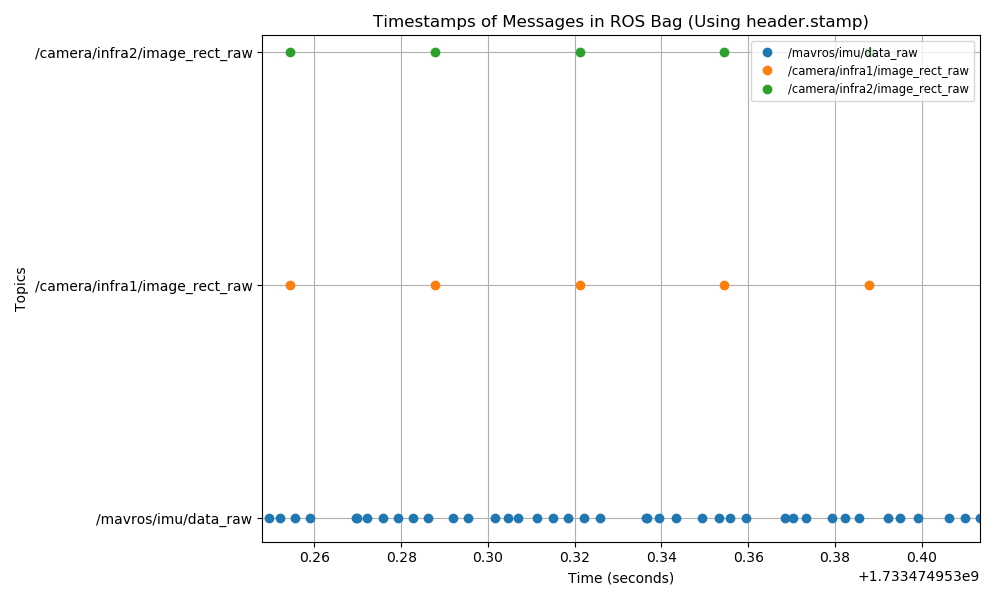
自己搭建的 fast-drone-xi35 相机和 imu 未作同步,时间偏移量倒是不大,约为 1.6 ms。
python 脚本:
#!/usr/bin/env python
import rosbag
import matplotlib.pyplot as plt
from collections import defaultdict
from std_msgs.msg import Header
def visualize_rosbag_timestamps(bag_file):
"""
Visualize timestamps of all topics in a ROS bag file using msg.header.stamp.
"""
# Dictionary to store timestamps for each topic
topic_timestamps = defaultdict(list)
# Read the bag file
with rosbag.Bag(bag_file, 'r') as bag:
for topic, msg, t in bag.read_messages():
# Check if the message has a header with stamp field
if hasattr(msg, 'header') and hasattr(msg.header, 'stamp'):
# Convert the header.stamp (ros::Time) to seconds
timestamp = msg.header.stamp.to_sec()
# Store the timestamp for the topic
topic_timestamps[topic].append(timestamp)
else:
# If no header.stamp, use the default timestamp (from rosbag)
topic_timestamps[topic].append(t.to_sec())
# Plot timestamps for each topic
plt.figure(figsize=(10, 6))
for topic, timestamps in topic_timestamps.items():
plt.plot(timestamps, [topic] * len(timestamps), 'o', label=topic)
# Configure the plot
plt.title("Timestamps of Messages in ROS Bag (Using header.stamp)")
plt.xlabel("Time (seconds)")
plt.ylabel("Topics")
plt.yticks(range(len(topic_timestamps)), topic_timestamps.keys())
plt.legend(loc='upper right', fontsize='small')
plt.grid(True)
plt.tight_layout()
# Show the plot
plt.show()
if __name__ == '__main__':
# Specify the ROS bag file to analyze
bag_file = '../rosbags/MH_05_difficult_offset3ms.bag' # Replace with your ROS bag file path
# Visualize timestamps
visualize_rosbag_timestamps(bag_file)